ΥΡœύ≤ΫΫχΒγΜζ‘≠άμΆΦ
±ΨΈΡœ»Ϋι…ήΗΟ≤ΫΫχΒγΜζΒΡΙΛΉς‘≠άμΘ§»ΜΚσΫι…ήΝΥΤδ«ΐΕ·ΤςΒΡ»μΓΔ”≤Φΰ…ηΦΤΓΘ
ΓΓΓΓ1. ≤ΫΫχΒγΜζΒΡΙΛΉς‘≠άμ
ΓΓΓΓΗΟ≤ΫΫχΒγΜζΈΣ“ΜΥΡœύ≤ΫΫχΒγΜζΘ§≤…”ΟΒΞΦΪ–‘÷±ΝςΒγ‘¥Ι©ΒγΓΘ÷Μ“ΣΕ‘≤ΫΫχΒγΜζΒΡΗςœύ»ΤΉιΑ¥Κœ ΒΡ ±–ρΆ®ΒγΘ§ΨΆΡή Ι≤ΫΫχΒγΜζ≤ΫΫχΉΣΕ·ΓΘΆΦ1 «ΗΟΥΡœύΖ¥”Π Ϋ≤ΫΫχΒγΜζΙΛΉς‘≠άμ Ψ“βΆΦΓΘ
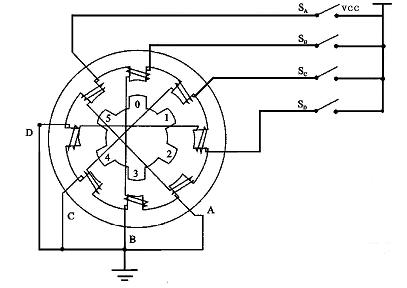
ΆΦ1 ΥΡœύ≤ΫΫχΒγΜζ≤ΫΫχ Ψ“βΆΦ
ΓΓΓΓΩΣ Φ ±Θ§ΩΣΙΊSBΫ”Ά®Βγ‘¥Θ§SAΓΔSCΓΔSDΕœΩΣΘ§Bœύ¥≈ΦΪΚΆΉΣΉ”0ΓΔ3Κ≈≥ίΕ‘ΤκΘ§Ά§ ±Θ§ΉΣΉ”ΒΡ1ΓΔ4Κ≈≥ίΨΆΚΆCΓΔDœύ
»ΤΉι¥≈ΦΪ≤ζ…ζ¥μ≥ίΘ§2ΓΔ5Κ≈≥ίΨΆΚΆDΓΔAœύ»ΤΉι¥≈ΦΪ≤ζ…ζ¥μ≥ίΓΘ
ΓΓΓΓΒ±ΩΣΙΊSCΫ”Ά®Βγ‘¥Θ§SBΓΔSAΓΔSDΕœΩΣ ±Θ§”…”ΎCœύ»ΤΉιΒΡ¥≈ΝΠœΏΚΆ1ΓΔ4Κ≈≥ί÷°Φδ¥≈ΝΠœΏΒΡΉς”ΟΘ§ ΙΉΣΉ”ΉΣΕ·Θ§1ΓΔ4Κ≈≥ίΚΆCœύ»ΤΉιΒΡ¥≈ΦΪΕ‘ΤκΓΘΕχ0ΓΔ3Κ≈≥ίΚΆAΓΔBœύ»ΤΉι≤ζ…ζ¥μ≥ίΘ§2ΓΔ5Κ≈≥ίΨΆΚΆAΓΔDœύ»ΤΉι¥≈ΦΪ≤ζ…ζ¥μ≥ίΓΘ“ά¥ΈάύΆΤΘ§AΓΔBΓΔCΓΔDΥΡœύ»ΤΉι¬÷ΝςΙ©ΒγΘ§‘ρΉΣΉ”Μα―ΊΉ≈AΓΔBΓΔCΓΔDΖΫœρΉΣΕ·ΓΘ
ΓΓΓΓΥΡœύ≤ΫΫχΒγΜζΑ¥’’Ά®ΒγΥ≥–ρΒΡ≤ΜΆ§Θ§Ω…Ζ÷ΈΣΒΞΥΡ≈ΡΓΔΥΪΥΡ≈ΡΓΔΑΥ≈Ρ»ΐ÷÷ΙΛΉςΖΫ ΫΓΘΒΞΥΡ≈Ρ”κΥΪΥΡ≈ΡΒΡ≤ΫΨύΫ«œύΒ»Θ§ΒΪΒΞΥΡ≈ΡΒΡΉΣΕ·ΝΠΨΊ–ΓΓΘΑΥ≈ΡΙΛΉςΖΫ ΫΒΡ≤ΫΨύΫ« «ΒΞΥΡ≈Ρ”κΥΪΥΡ≈ΡΒΡ“ΜΑκΘ§“ρ¥ΥΘ§ΑΥ≈ΡΙΛΉςΖΫ ΫΦ»Ω…“‘±Θ≥÷ΫœΗΏΒΡΉΣΕ·ΝΠΨΊ”÷Ω…“‘ΧαΗΏΩΊ÷ΤΨΪΕ»ΓΘ
ΓΓΓΓΒΞΥΡ≈ΡΓΔΥΪΥΡ≈Ρ”κΑΥ≈ΡΙΛΉςΖΫ ΫΒΡΒγ‘¥Ά®Βγ ±–ρ”κ≤®–ΈΖ÷±π»γΆΦ2.aΓΔbΓΔcΥυ ΨΘΚ

a. ΒΞΥΡ≈Ρ b. ΥΪΥΡ≈Ρ cΑΥ≈Ρ
ΆΦ2.≤ΫΫχΒγΜζΙΛΉς ±–ρ≤®–ΈΆΦ
ΓΓΓΓ2.Μυ”ΎAT89C2051ΒΡ≤ΫΫχΒγΜζ«ΐΕ·ΤςœΒΆ≥Βγ¬Ζ‘≠άμ
ΓΓΓΓ≤ΫΫχΒγΜζ«ΐΕ·ΤςœΒΆ≥Βγ¬Ζ‘≠άμ»γΆΦ3ΘΚ
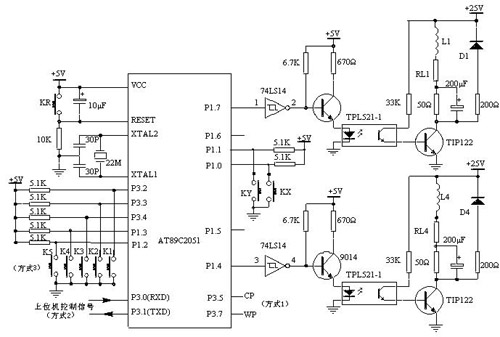
ΆΦ3 ≤ΫΫχΒγΜζ«ΐΕ·ΤςœΒΆ≥Βγ¬Ζ‘≠άμΆΦ
ΓΓΓΓAT89C2051ΫΪΩΊ÷Τ¬ω≥ε¥”P1ΩΎΒΡP1.4~P1.7 δ≥ωΘ§Ψ≠74LS14Ζ¥œύΚσΫχ»κ9014Θ§Ψ≠9014Ζ≈¥σΚσΩΊ÷ΤΙβΒγΩΣΙΊΘ§ΙβΒγΗτάκΚσΘ§”…ΙΠ¬ ΙήTIP122ΫΪ¬ω≥ε–≈Κ≈Ϋχ––Βγ―ΙΚΆΒγΝςΖ≈¥σΘ§«ΐΕ·≤ΫΫχΒγΜζΒΡΗςœύ»ΤΉιΓΘ Ι≤ΫΫχΒγΜζΥφΉ≈≤ΜΆ§ΒΡ¬ω≥ε–≈Κ≈Ζ÷±πΉς’ΐΉΣΓΔΖ¥ΉΣΓΔΦ”ΥΌΓΔΦθΥΌΚΆΆΘ÷ΙΒ»Ε·ΉςΓΘΆΦ÷–L1ΈΣ≤ΫΫχΒγΜζΒΡ“Μœύ»ΤΉιΓΘAT89C2051―Γ”ΟΤΒ¬ 22MHzΒΡΨß’ώΘ§―Γ”ΟΫœΗΏΨß’ώΒΡΡΩΒΡ «ΈΣΝΥ‘ΎΖΫ Ϋ2œ¬ΨΓΝΩΦθ–ΓAT89C2051Ε‘…œΈΜΜζ¬ω≥ε–≈Κ≈÷ήΤΎΒΡ”ΑœλΓΘ
ΓΓΓΓΆΦ3÷–ΒΡRL1~RL4ΈΣ»ΤΉιΡΎΉηΘ§50ΠΗΒγΉη «“ΜΆβΫ”ΒγΉηΘ§ΤπœόΝςΉς”ΟΘ§“≤ «“ΜΗωΗΡ…ΤΜΊ¬Ζ ±Φδ≥Θ ΐΒΡ‘ΣΦΰΓΘD1~D4ΈΣ–χΝςΕΰΦΪΙήΘ§ ΙΒγΜζ»ΤΉι≤ζ…ζΒΡΖ¥ΒγΕ· ΤΆ®Ιΐ–χΝςΕΰΦΪΙήΘ®D1~D4Θ©ΕχΥΞΦθΒτΘ§¥”Εχ±ΘΜΛΝΥΙΠ¬ ΙήTIP122≤Μ ήΥπΜΒΓΘ
|



