 
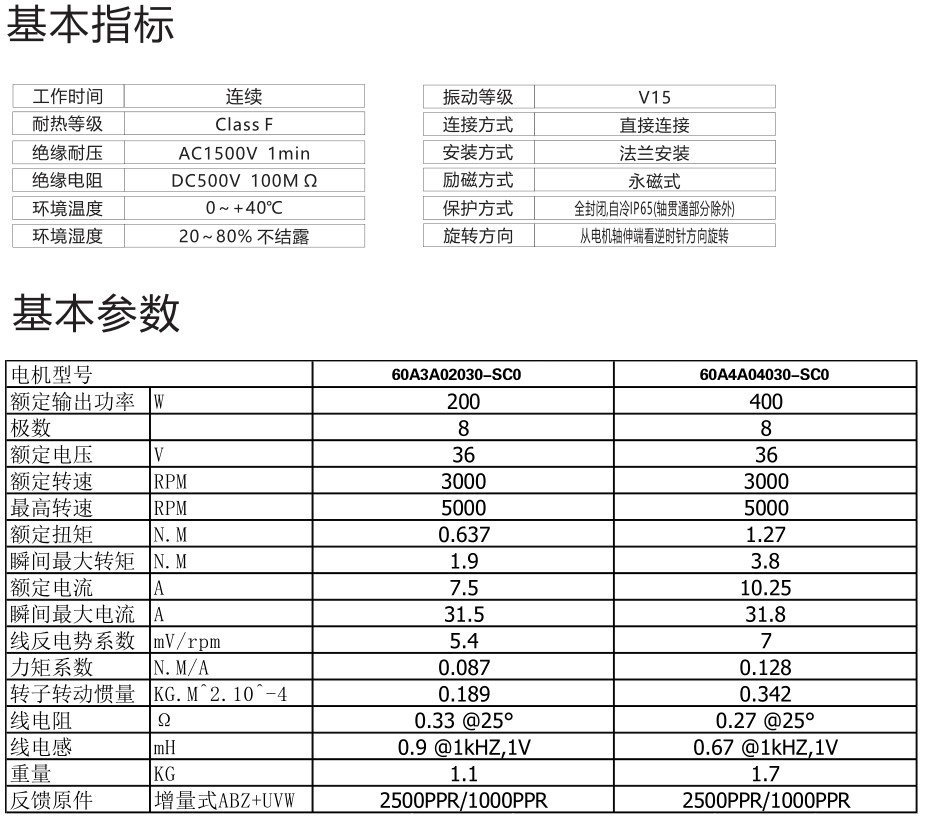
今天主要介绍一下上图两款400W、200W通用伺服电机驱动器DM-806A,如何利用CAN总线控制 DM-806A低压伺服驱动器具有 CAN 总线控制方式,可以代替外部脉冲和模拟量信号,具有可靠,方便,监控驱动器状态,接线少等特点,使用也很简单, 
利用参数调节小板,只需将如下参数设置为相应值即可

由此可以看出:除 40 号必须设定为 1 外,参数 02 号会经常用到,参数 00 号/ 0c号/0e 号偶尔会重新设定,其他参数 0d 号/ 41 号/51 号不用考虑。
参数设置详细说明 1. 设置过程 目前有两种设置手段,其一是配置外置手持的设定操作面板,其二是通过电脑上位软件模拟操作面板,用电脑时候需要自配 USB 转 RS232 工具,并下载安装模拟软件后启动,这时弹出设置串口号提示,用户可在电脑的控制面板里查看安装的串口号输入就进入和手持的操作面板类似的界面,进行相同的操作,以 40 号参数为例,设置过程如下: 按 Mode 键两秒,进入模式选择状态,显示 dp-spd 按 Mode 键进行模式选择,显示 PA-00,即参数编辑子状态 反复按 Add 键,选择参数,直到出现 PA-40 按 Set 键进入编辑参数 40 按 Add 键将 40 号参数增加为 1 按 Set 键确认退出到参数选择状态 按 Mode 键,选择参数存储状态,显示 EE-SET 按 Set 键,开始存储,最后出现 Finish,表示存储完毕 断电,等指示等灭后重新上电,新设参数即有效。 2. 位置运行方式 此时,CAN 数据包发送的数据相当于脉冲增量值,电机每转 10000 个脉冲。要注意发送的时间间隔,比如一次发数值 10000,和以 1ms 的间隔发 1000 次数值 10,电机轴运行的角度是一样的,但两者运行平稳度效果是不一样的,因为后者同时控制了位置和速度,是典型的运动控制插补算法,位置控制时候典型发送数据包如下 以 1ms 间隔发送,相当于 60rpm 
3. 速度运行方式 此时发送的是绝度速度值,单位为 0.25rpm,发送时间间隔大于等于 1ms 以上并小于 500ms 即可,大于 500ms 没有发送速度值则自动停机。以 10ms 间隔发送,相当于 60rpm 
4. 数据回传 通过参数 para[0x0E]选择是否向上位机发送数据包。同时将上位机 ID 号设为 0.电机状态和编码器运行累计值可以通过数据包回馈给上位机,数据包如下: 

从中可以看出:通过查看字节 1 可以知道是哪个驱动器反馈回来的;查看字节 2可以监控驱动器状态;把字节 3 和字节 4 合成后可以计算位置值(16 位值=【BYTE4<<8+BYTE3】),提高系统性能。
产品尺寸图如下: 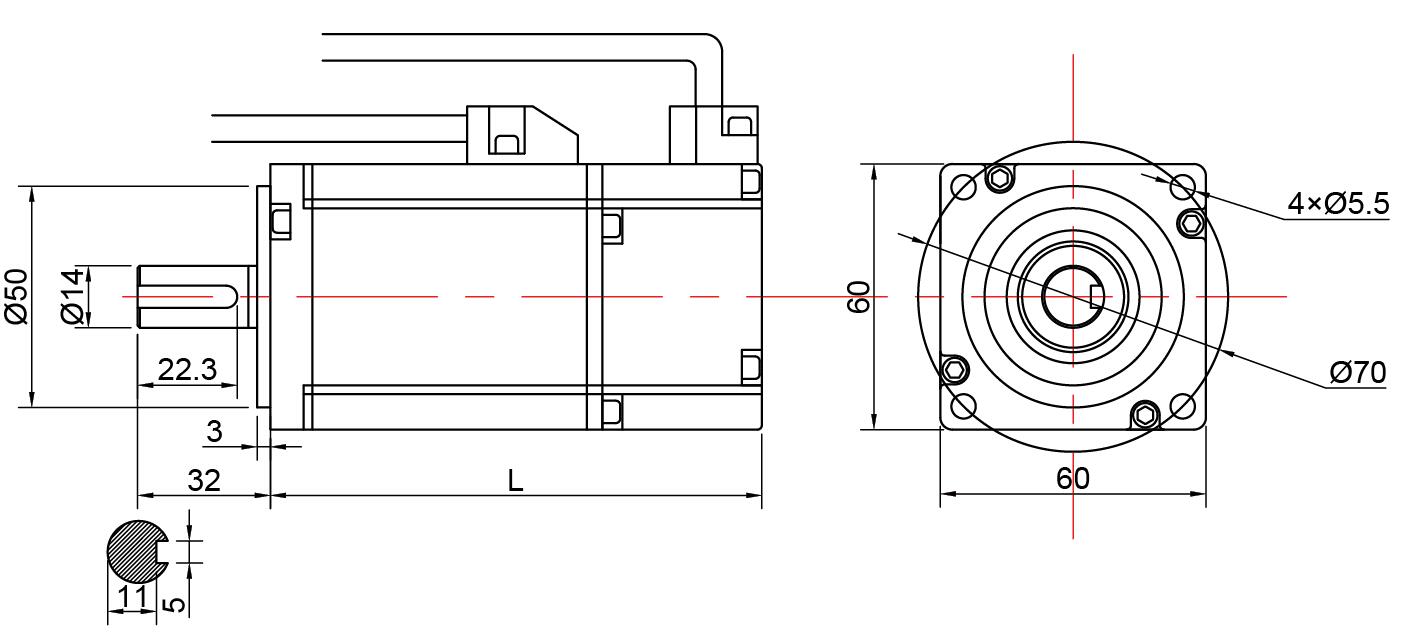
联系方式:QQ:467102884 电话:13811070445(刘女士)
相关文章: 适用于高转速,低噪音场合的高性能低压伺服电机 200W低压伺服电机及配套驱动的经典搭配 400W低压伺服电机及配套驱动的经典搭配 支持位置/ 速度闭环控制的高性能低压伺服驱动器DM-055B 关于低压伺服驱动器报警指示及常见问题解答 60系列交流伺服电机的市场应用 80系列交流伺服电机的市场应用 110系列交流伺服电机的市场应用 130系列交流伺服电机的市场应用 |


