前言 ZM-6610M是一款功能强大的直流无刷驱动器,速度/位置闭环控制 ,1-10A电流可调节 9V-60V宽范围电压输入,驱动本身还带有特殊功能,电机自学习功能,电机相线和霍尔信号线可以随便接, 行程自学习功能,外接限位开关,可在一定距离里 来回往复运行! 点击此段文字可下载完整版说明 提取码:l441 ZM-6610M 直流有感无刷电机驱动器功能特点
*支持电压 9V~60V,额定输出电流 10A *支持占空比调速(调压)、转矩控制(稳流)、速度闭环控制(稳速)、位置闭环控制(角 度、距离控制)多种调速方式 *支持电位器、模拟信号、逻辑电平、开关量、PWM、频率、脉冲、RS485 多种输 入信号 *支持模拟信号电压范围配置与逻辑电平电压配置, 模拟信号可支持 0~3.3/5/10V 等 电压范围, 逻辑电平可支持 0/3.3/5/12/24V 等电压; 支持模拟信号线性度调整与逻 辑电平阈值配置 *支持 RS485 多机通讯,支持 MODBUS-RTU 通讯协议,方便多种控制器(如 PLC) 通讯控制,支持通讯中断停机保护 *支持加减速缓冲时间与加减速加速度控制, 可在指定行程内自动加减速并精确定位 *电机电流 PID 调节控制,电流控制精度 0.1A,****启动/负载电流、制动(刹车)电 流可分别配置;支持电机过载和堵转限流,防止过流损坏电机 *内置大功率刹车电阻可提供 6A 持续刹车电流 *支持电机相序学习、霍尔错误保护 *支持电机正反转限位,可外接两个限位开关分别对正转和反转限位 *支持电机转速测量,支持电机堵转检测/堵转限位停转 *支持故障报警 *18kHz 的 PWM 频率,电机调速无 PWM 嚣叫声 *极小的 PWM 死区,仅 0.5us,PWM 有效范围 0.1%~**** *全部接口 ESD 防护,可适应复杂的现场环境 *使用 ARM Cortex-M3@72MHz 处理器
技术参数 


原理概述 本驱动器使用****的电机电流精确检测技术、有感无刷电机自测速、有感无刷电机转动 位置检测、再生电流恒电流制动(或称刹车)技术和强大的 PID 调节技术可****地控制电机平 稳正反转、换向及制动,输出电流实时调控防止过流,精准控制电机转速和转动位置,电机 响应时间短且反冲力小。 1.3.1 电机加减速控制 电流自动调节、加速度自动控制的软启动方式,电机可迅速、平稳启动而反冲力小。支 持加减速时间和加减速加速度配置。 1.3.2 电机制动(刹车)控制 电流自动调节的能耗制动方式,电机制动时间短而无强烈的冲击震动。支持制动电流配 置。 1.3.3 电机换向控制 电机正反转切换的过程由驱动器内部控制,自动进行减速、软制动、软启动控制,无论 换向信号改变多么频繁,都不会造成驱动器或电机损坏。 1.3.4 电机稳速控制 通过霍尔信号检测转速和转动位置,使用 PID 调节算法进行闭环控制,支持速度闭环 控制和时间-位置闭环控制两种稳速控制算法。速度闭环方式具有在高速时速率控制平稳且 超调小的特点,但在低速时调可能速度控制不平稳;时间-位置闭环控制方式适合于多台驱 动器控制多个电机在相同时间内转动相同的角度的控制要求,也适合于超低速控制。 1.3.5 电机位置控制 通过霍尔信号检测转动位置,使用 PID 调节算法进行位置闭环控制,使用刹车电阻进 行减速。 1.3.6 电机转矩控制 由于电机转矩与电流大小为近似的线性关系,本驱动器使用稳流输出控制方式来实现电 机转矩控制,用户通过调节输出电流的大小来实现对电机转矩大小的控制。 1.3.7 电机过载和堵转保护 电机过载时,驱动器将限流输出,有效地保护电机;电机堵转时,驱动器可检测该状 态并对电机制动。 1.3.8 内部干扰抑制 为了保证电机回路电流测量的精度,驱动电路与控制电路间通过干扰衰减和消耗、瞬态 干扰抑制方式耦合,可有效保证控制电路不受驱动电路干扰的影响。 1.3.9 外部干扰抑制 使用 ESD 防护器件和静电泄放电路来对全部接口进行 ESD 防护,以抵抗外部干扰从而 使内部电路稳定工作和保护内部器件不被加在接口上的瞬态高压静电击坏。 1.3.10 485 通讯干扰抑制 使用信号、电源隔离芯片对 485 收发电路进行隔离从而抑制干扰。
今天的讲解就到这里了哦!接下来会继续讲解更多产品特性及更多编程知识,感兴趣的朋友可以致电或扫描下方二维码添加微信好友索要详细资料哦!!
联系人:李经理 联系方式:17600500753(同微信 QQ) 
打开手机淘宝扫一扫关注店铺 
打开手机微信扫一扫添加好友
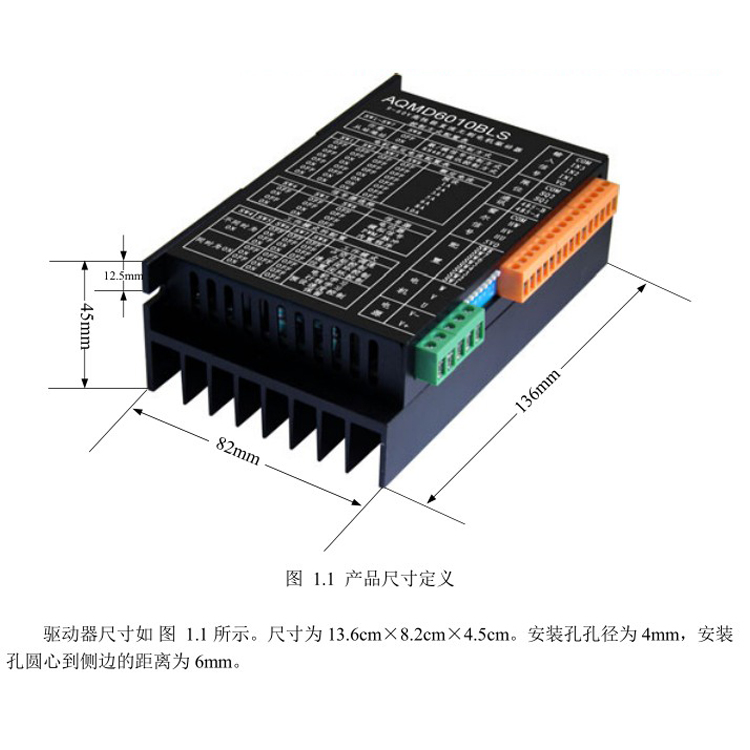
|


