受芯片短缺影响,时代超群无刷驱动器ZM-6405E已停止生产,为满足客户需求推出ZM-6505替代款。(点击下载ZM-6505说明书) ZM-6505是我公司基于BiCD工艺集成电路开发的高性能直流无刷控制器(驱动器),具有体积小、可靠性高、寿命长、易于使用等特点。是一款高集成度高可靠性无刷直流(BLDC)电机控制器。 
ZM-6505参数介绍: 产品特点 高集成度高可靠性无刷直流(BLDC)电机控制器 三相全桥,PWM 方波驱动控制 过流保护措施,过载时立即关断输出及时保护电机 纯硬件设计,高速度,高抗干扰能力 宽幅电压兼容 DC12-50V 低发热,大功率
主要功能 欠电压(≤12V)、过压 50V 堵转 3 秒自动保护 霍尔错误保护 输出 5A,过流关断输出 支持内置电位器、外接电位器、模拟电压和 PWM 调速 带有使能反转功能,灵活配合常开、常闭控制系统 具有缓启动功能,避免电流过冲,有效保护电机 缓启动时间多档定制(0S、1S、3S、10S)默认 1S
产品工作条件 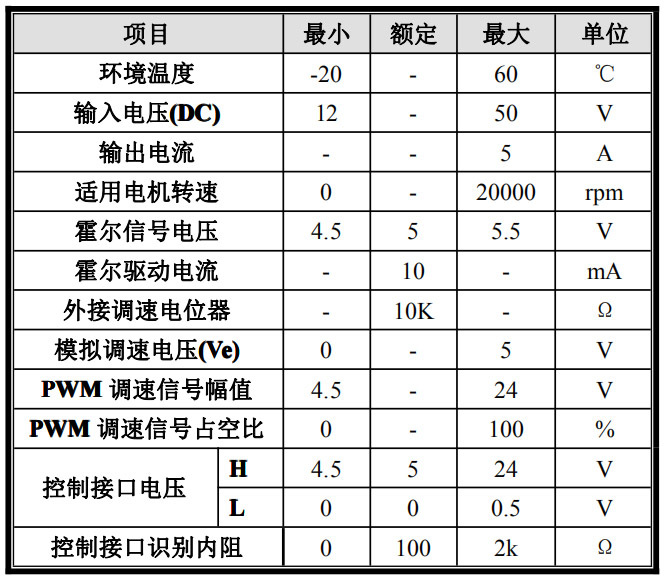
接口定义 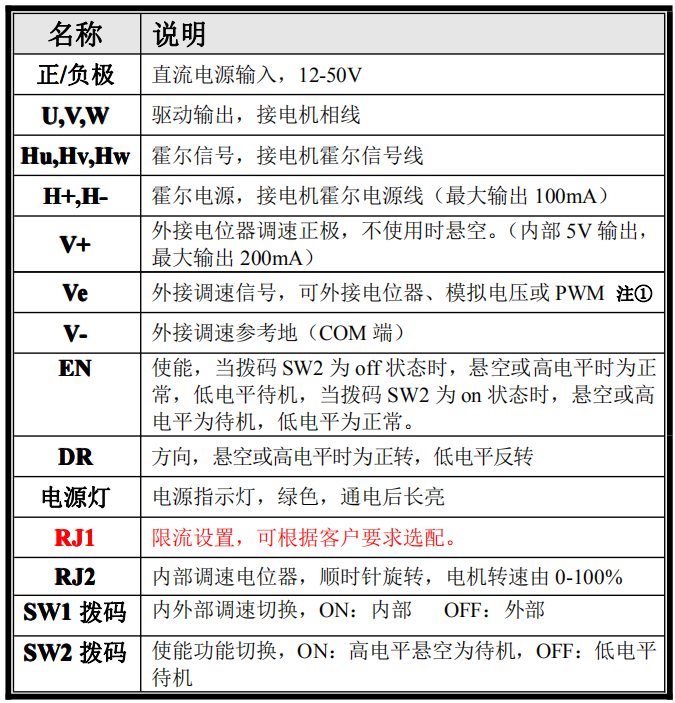
注①:使用此功能时请确认驱动器侧面的“SW1”拨码为OFF状态 限流说明 本控制器采用输出限流方式,有效避免因启动或 负载加大时电流过大导致工作异常。实际使用时请根 据电机参数设置输出限流值。 调节示意如右图: 
注:此功能为选配功能,默认产品一律为固定值**电流。 调速方式示意 1.内部调速 使用内部调速时,将拨码SW1切换到ON状态,内 部调速电位器顺时针由低旋转至****,电机转速由 0-****。 调节示意如右图: 
2.外部调速 使用外部调速时,将拨码SW1切换到 OFF状态。 2.1:外接10K电位器调速,需将电位器接到 驱动器的V+、Ve、V-接口;通过旋转电位 器来调节电机转速(Ve接电位器的中间 脚),接线示意如下图: 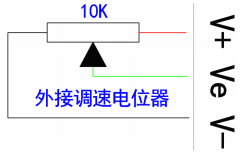
2.2:外接模拟电压调速,V-(COM)为参考地,Ve接0-5V电压信号, 其中在1-4.6V时电机速度有变化,接线示意及电压-转速对应图如下: 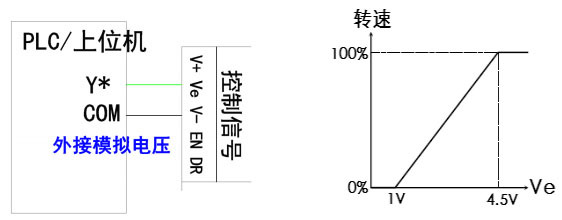
2.3:外接PWM信号调速,V-为参考地,Ve接PWM信号,PWM电压幅 值为5V,频率为1-10KHz,接线示意及占空比-输出对应图如下: 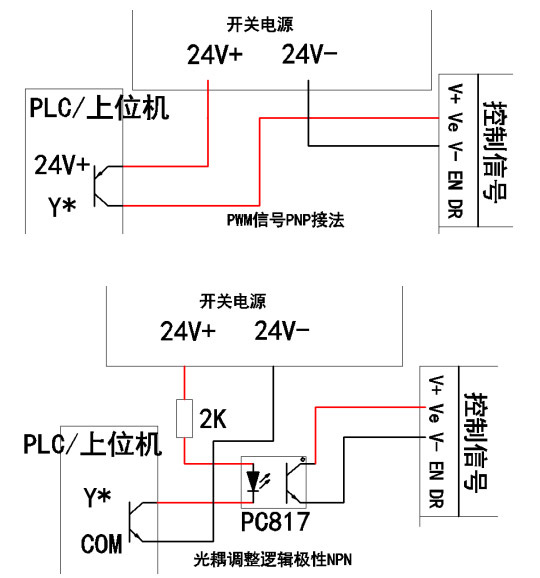
注意! 内外部切换拨码SW1只 对调速信号起作用,无论是使用内 部电位器控制电机转速,还是外接 调速信号控制电机转速,控制信号 侧方向、使能信号均受控。Ve调 速信号****工作电压24V,调速范 围****5V,这主要是适应PLC用 户不需要接限流电阻。 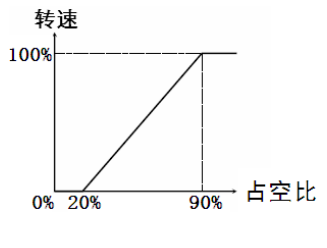
控制信号应用 1.1使能控制 当使能信号输入高电平(EN悬空状态)。 SW2 ON,驱动器待机,电机停止转动; SW2 OFF,驱动器工作,电机恢复转动。 当使能信号输入低电平情况下,(EN与V-短接)。 SW2 ON,驱动器工作,电机恢复转动; SW2 OFF,驱动器待机,电机停止转动。 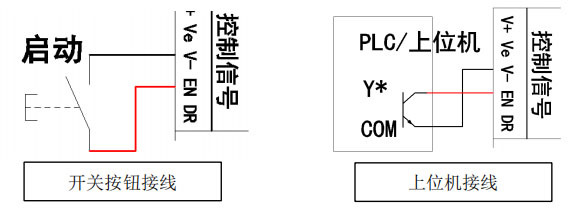
1.2方向控制 DR输入高电平(DR悬空状态),电机正向转动; DR输入低电平(DR与V-短接),电机反向转动。 DR切换状态时驱动器将自动执行能耗制动0.5S。 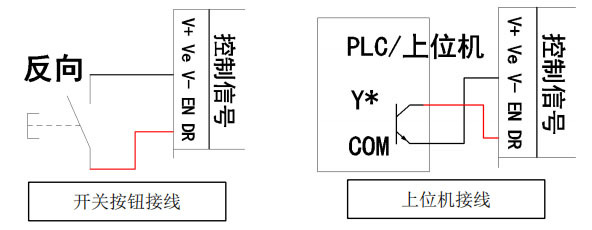
注意! 必须在电机低速或停止状态下才能改变DR状态,否则可能 损坏控制器与电机。 1.3内部端口等效图 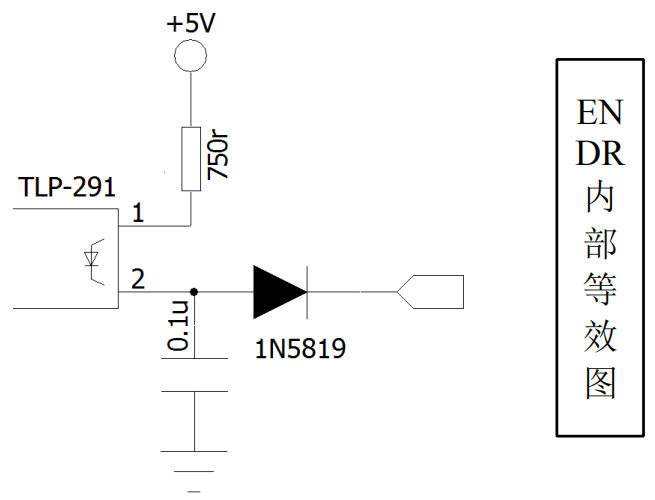
系统参考图 1.无刷系列产品线序参考图 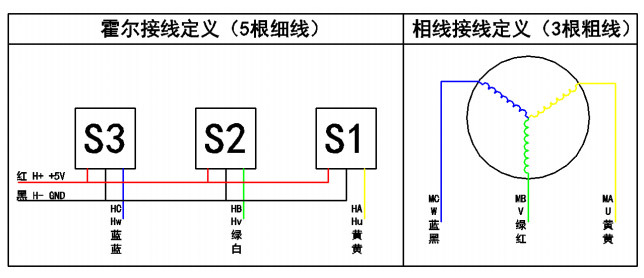
2.基本系统参考图 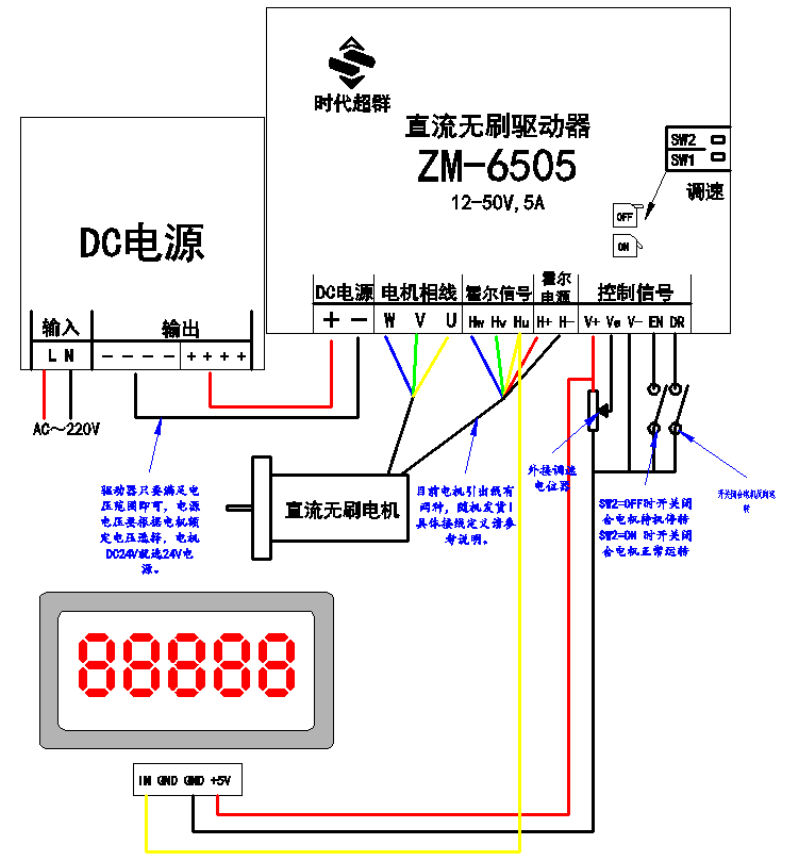
保护恢复 本控制具有多重保护功能,在保护功能起作用后可采取正确方法解除 保护。 1.欠压保护,驱动器供电电压低于11V时驱动器进入保护状态。解除 此保护请先断电,将电源电压调高至12V后再通电。 2.过压保护,驱动器供电电压高于50V时驱动器进入保护状态。解除 此保护请先断电,将电源电压调低至50V后再通电。 3.堵转保护,当电机堵转3秒后驱动器会关断输出并进入保护状态, 此时应尽快将使能置低或关闭电源,待电机堵转问题解决后再重新通电。 4.霍尔错误保护,驱动器检测到霍尔错误后会关断输出并进入保护状 态,此时应尽快将使能置低或关闭电源,排除霍尔错误后再重新通电。 注意! 为避免勿保护情况发生,在不需要电机转动时,请将使能置 低或将调速降至**(电位器拧至****、模拟电压降至0V,PWM降 至0%) 外形尺寸 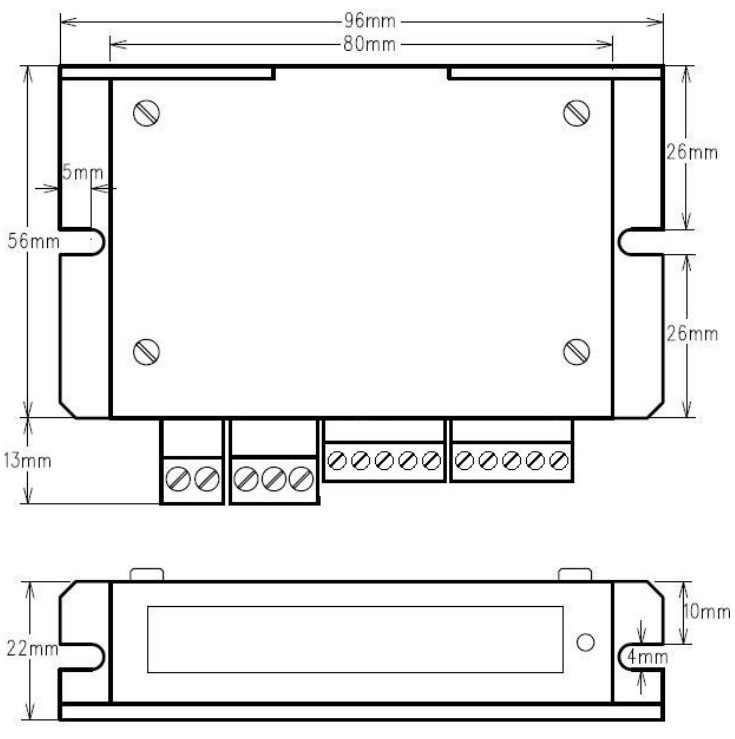

|


