
控制要求: 1. 工作在力矩模式下 2. 运动过程中随时改变力矩和速度的大小(在不同的位置改变力矩和速度) 3. 方向的正反转控制 4. 启动和停止 参数设置: PA组: PA-4=2(转矩控制) PA-32=1(内部转矩输入) PA-50=3000(3000为转速,可以随意修改) PA-53=1(内部使能) PA-64=1.00(内部转矩指令,值为%比,如写入10则为0.1的扭矩) P3-16(可随意改变电机运转方向) 485通讯设置: PA-71(MODBUS通讯地址,默认1) PA-72(MODBUS波特率,默认9600,可调范围****115200) PA-73(MPDBUS通讯协议,默认0:8.N.2) 整体运行举例:以MODBUS调式精灵八进制为例 修改速度:PA-50改200转速 地址:所有PA参数请参照说明书对应的章节。每个参数使用16bit的数据表示,每个参数 的通信地址由参数序号确定,地址为16bits。参数的地址例如:参数1(PA-0)表示为0X0000,参数2 (PA-1)表示为0X0001,其他参数依次类推: PA-50转换成十六进制地址应为(0x0032H+0x080)=0x00B2H,写入(如200转速,由200转换成十六进制应为C8)将C8写入0x00B2H即为200转速。(0x080是偏移地址,所有参数通讯地址都要加上0x080,数据只写入并执行,但不保存,不影响正常通讯) 以MODBUS调式精灵为例(0x0032H+0x080)=0x00B2H转换成八进制地址为262,将C8写入262寄存器地址即为200转 发送:01 06 00 32 00 C8 29 93 反馈:01 06 00 32 00 C8 29 93 改变转矩:(转矩值为%比) 地址:PA-64=地址十六进制(0x0040H+0x0800)=0x00C0H,如需要20的转矩,则将十进制的20转换成十六进制应为14,将14写入0x00C0H即为0.20即20%的转矩。 发送:01 06 00 40 00 14 88 11 反馈:01 06 00 40 00 14 88 11 改变方向: 地址:0x0110H+0x80=(0x0190H) 写入:0为正转,1为反转 发送:01 06 01 10 00 00 89 F3(为正转) 发送:01 06 01 10 00 01 48 33(为反转) 启动与停止: 地址:(0x010FH+0x080)=0x018FH 发送:01 06 01 0F 00 80 B9 95(为停止) 发送:01 06 01 0F 00 00 B8 35(为启动) 参数的写入与读出的参数格式说明 经由通讯所能够写入与读出的参数格式说明(状态量读取请参考1.5章节):所读取和写入的 参数必须为十进制的整形数,在驱动器显示面板和说明书手册中标记有带小数点的参数,在读取和 写入操作的过程中都被放大了相应的倍数,使其变成十进制的整形数。显示格式为二进制的参数, 在读取和写入操作的过程中实际使用的为其等值的十进制整形数。具体如下,PA组各参数变化方式 详见说明书参数对应的章节说明: PA组参数序列号 | 说明书显示值 | 通讯操作值 | 变换方式 | 1 | 315 | 315 | 不变 | 63 | 1.00 | 100 | 放大100倍 | 57 | 0100(二进制) | 4(十进制) | 二进制转十进制 |
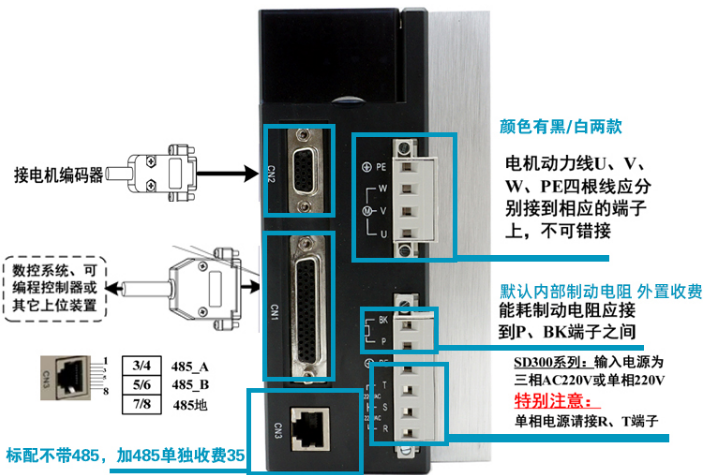
SD300系列伺服驱动器首次使用操作指南T3L(MASL) SD300系列伺服电机上电异响如何处理?(masl) SD300系列伺服驱动器如何接电源线?(MASL)
SD300系列伺服驱动器设如何设置使能?(masl) 时代超群新款SD300伺服驱动器恢复出厂设置时报错,如何处理?(MASL) 时代超群新款SD300系列伺服驱动器如何恢复出厂设置?(MASL) 时代超群新款SD300系列伺服驱动器Err-4报警“位置超差”如何处理?(MASL) 时代超群SD300系列伺服驱动器报警及解决方法(MASL)
北京时代超群电器科技有限公司核心产品包括步进电机系统、无刷电机系统、伺服电机系统三大系列几十个品种,规格齐全、功能强大,性能优良,品质可靠,具有极高性价比,另有直线导轨模组、减速机等电机配件。公司产品广泛应用于数控机床、医疗设备、激光雕刻、纺织印刷、包装机械、机器人、电子设备等技术领域,产品畅销于国内并出口美国、俄罗斯、德国等60多个国家,公司也承接OEM和ODM订单。

|


