

 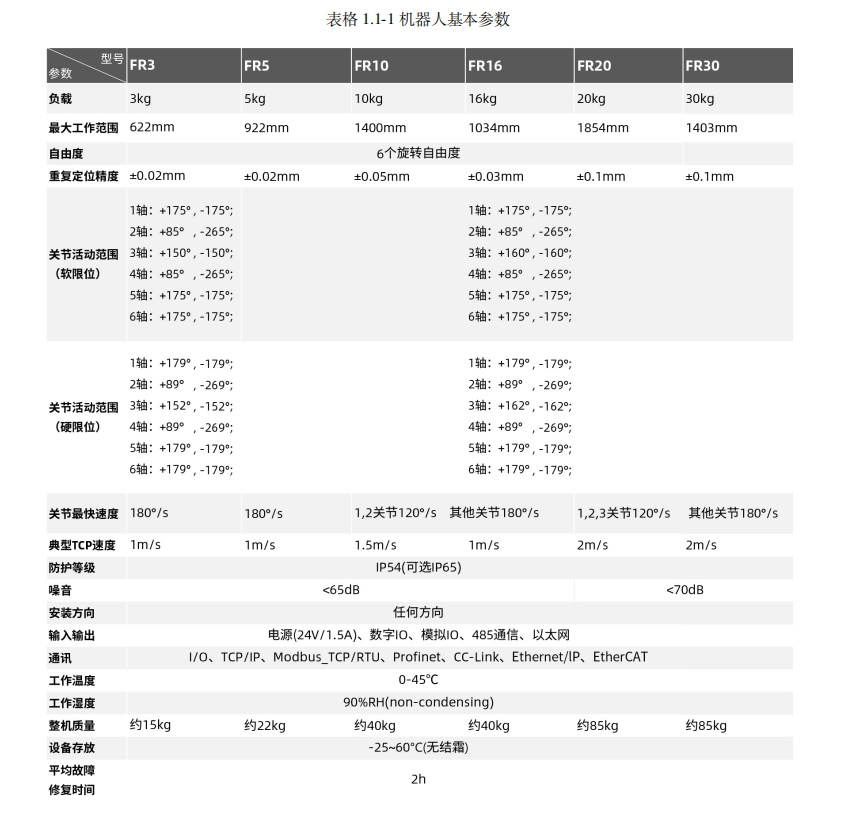
法奥协作机器人易编程、快部署、高安全,根据不同负载和臂展,共有6种规格型号:FR3 FR5 FR10 FR16 FR20 FR30;今天介绍一下法奥协作机器人的常见问题: 1、机器人有碰撞等级设置吗? 目前法奥意威协作机器人的碰撞等级,可选一到十级或选择自定义百分比设置,****即对应十级,每个轴可以分别设置不同的碰撞等级。碰撞策略可以设置机器人碰撞后的处理方式,分为报错停止和继续运动,用户可以根据具体使用需求来设定。
2、可以接安全停止和紧急停止吗?
控制箱上提供两路紧急停止和两路安全停止,需要根据图片示意在对应的IO口接线使用。 
3、上电之后,机器人不上电,怎么办? 进行以下排查:
①确认按钮盒上急停按钮是否松开,注意松开之后,需要断电重启。
②断电之后,按钮盒是否正确插入控制箱连接器,可插拔检查。控制器和机器人本体是否正常连接,需要重点检查该处是否松动,可重新拔插。
如未解决,请与售后支持人员联系。
4、机器人上电之后一直三色灯循环,无法转为绿色灯常亮,正常使用,怎么办? 断电之后,重新拔插机器人连接线、电源线、按钮盒连接线,确保所有线连接无误之后,再次上电。如未解决,请与售后支持人员联系。
5、机器人报x轴超出软限位,怎么处理? 机器人关节存在软限位,当超出软限位时,会报这个故障,需要按住机器人末端凸出按钮,等待末端进入白青色光时,反方向拖动,只至报错清除。
6、如何重置机器人的IP设置? 支持软件版本3.5.8及以后,用户在配置完控制器地址后,可以通过以下方法重置IP地址及配置:
1、正常上电之后,长按按钮盒上的按钮30s,如图所示(左图为集成式mini控制箱的按钮盒,右图为标准式控制箱的按钮盒,注意两种按钮盒按住的按钮不一致),直到末端绿色灯闪烁5下后,关机重启,网址可默认恢复出厂设置。
2.电脑网线直连按钮盒的网口,打开浏览器,电脑登录 192.168.58.2地址(注意用户电脑IP地址需要更改为192.168.58.xx),即可正常登录示教界面。 
7、机器人报:关节指令超限,怎么解决? 运动过程中,指令超出软限位,需要修改点位/程序:切换到拖动模式,拖动机器人离开软限位区域;重新记录点位,保存程序后,重新点击START按钮即可执行。
8、机器人末端LED定义是什么? 
相关资讯
法奥协作机器人常见问题-示教器相关-masl 法奥协作机器人常见问题-通讯、二次开发相关问题-masl

|


