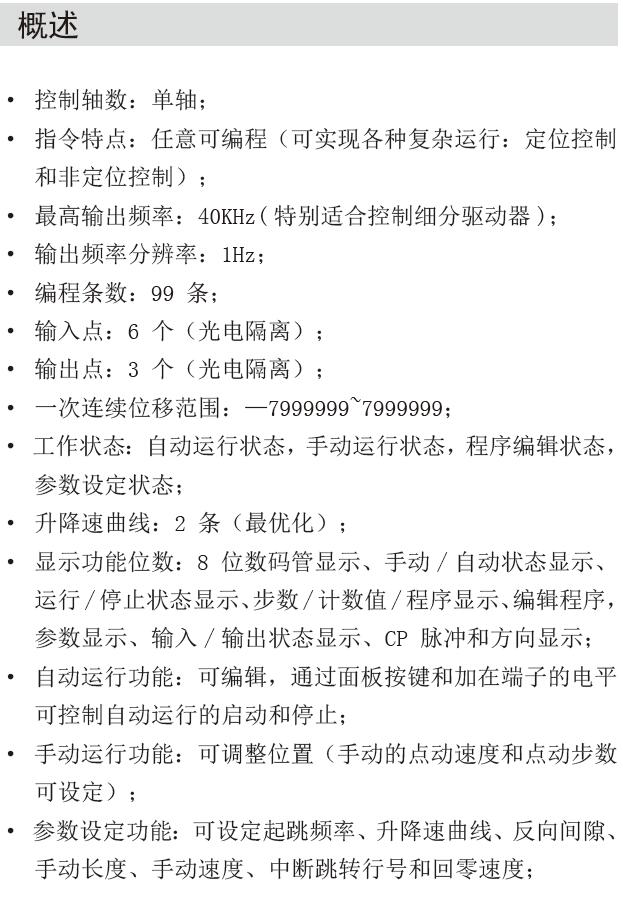
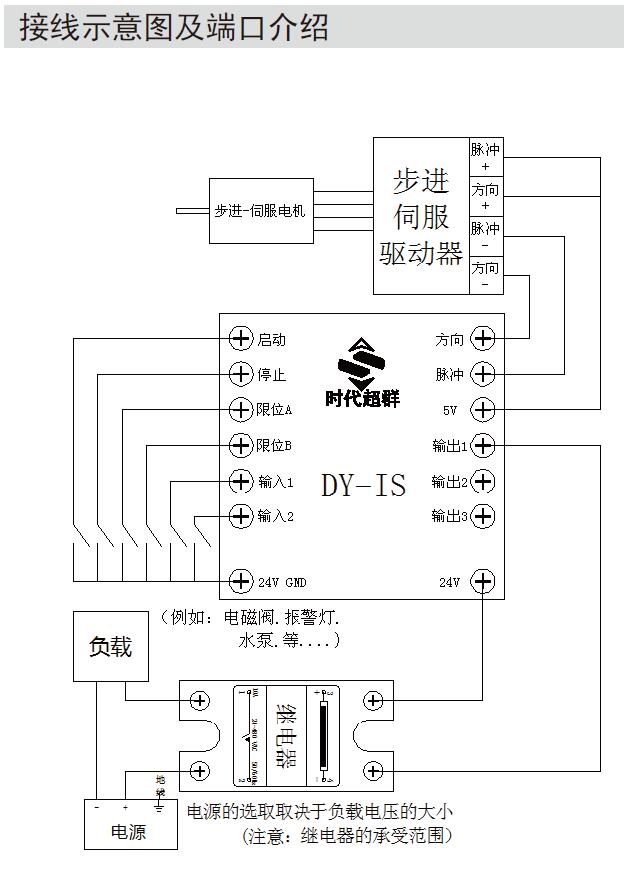
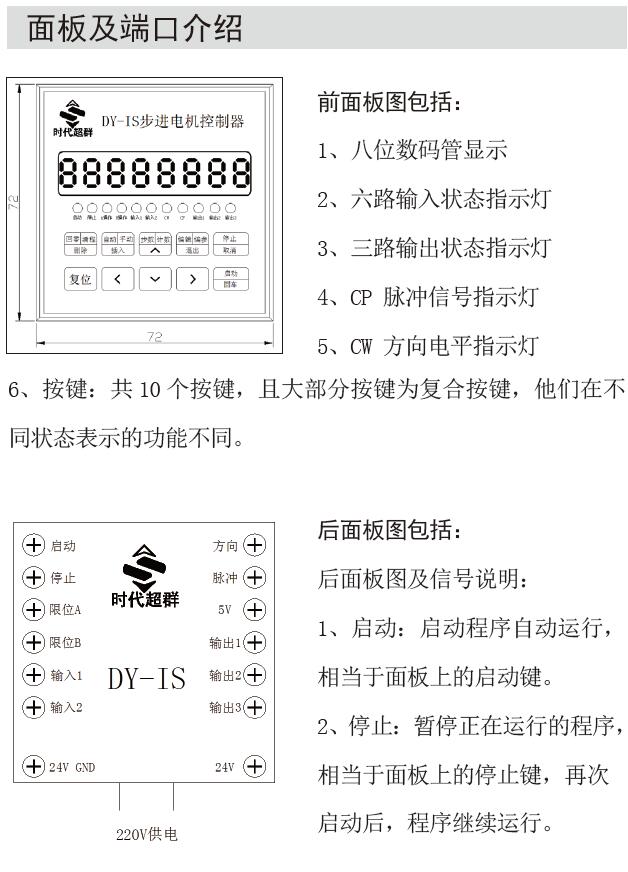
DY-IS 步进/ 伺服控制器,具有体积小、可靠性高、寿命长、易于使用指令丰富等特点。在使用本产品前,强烈建议您阅读以下安全注意事项,并在充分理解手册所有内容以后,再开始使用。  




序号 | 名称 | 参数显示形式 | 数据范围(单位) | 参数说明 | 1 | 起跳频率 | JF------ JF××××× | 400---39999 (Hz) | 如果设定值小于400HZ,系统将报警提示;用户根据自己的实际情况设定不同的起跳频率。 | 2 | 升降曲线 | Rs------ Rs × | L、H (条) | 控制器内部存有两条****化的升降速曲线,L为较慢的曲线;H为较快的曲线,可根据实际的负载情况选择不同的升降速曲线。 | 3 | 间隙补偿 | CC------ CC×××× | 0---9999 (脉冲数) | 主要用于补偿转动机构(如丝杠、齿轮等)反向间隙所引起的误差,补偿的位移量平不在控制器上显示 | 4 | 手动增量 | HL------ HL×××××× | 1---999999 (脉冲数) | 在手动状态下,手动操作时步进电机的位移量;如果设定值等于0,系统将报警提示。
| 5 | 手动速度 | HF------ HF××××× | 1---39999 (Hz) | 在手动状态下,手动操作时步进电机的运行速度;如果设定值等于0,系统将报警提示。
| 6 | 回零速度 | BF------ BF××××× | 1---39999 (Hz) | 回零操作时步进电机的运行速度;如果设定值等于0,系统将报警提示。
| 7 | A操作 入口地址 | NA------ NA ×× | 00---99 (行号) | 当程序正在运行时,如果“A操作”端有信号输入,电机作降速停止,程序在此中断,程序记住了中断处的坐标值,程序跳转此行号所指定的程序处运行程序。 | 8 | B操作 入口地址 | NB------ NB ×× | 00---99 (行号) | 当程序正在运行时,如果“B操作”端有信号输入,电机作降速停止,程序在此中断,程序记住了中断处的坐标值,程序跳转此行号所指定的程序处运行程序。 | 9 | 脉冲方式 | CP------ CP × | 0、1 | CP=0表示为单脉冲输出,后面板的CP端输出步进脉冲,CW端输出方向电平; CP=1表示为双脉冲输出,后面板的CP端输出正转步进脉冲,CW端输出反转步进脉冲 |
程序编辑状态的进出方式为:在手动状态下,按[编辑]键。即可进入到程序编辑状态。程序编辑完成后,按[退出]键返回到手动状态(参数将自动保存)。 本控制器的程序区最多可以编辑99条指令,程序中每一条指令有一个行号。行号为自动编号,从00开始按顺序排列,您可以在程序中插入或删除某行,但行号会重新分配。 程序格式是:每一条程序分两行显示(无参数程序除外),第一行显示行号和指令名称,第二行显示指令数据。程序的最后一条指令固定为“END”。 总之,程序的修改通过[∧]、[∨]、[<]、[>]、[插入]、[删除]、[回车]、[取消]八个键来完成;通过移动左右键使光标移至相应位上,这时数码将跳动显示,再通过上下键改变数值:用回车键进入数据修改状态,数据修改完成后,再用回车键确认退出或用取消键放弃修改。请参与《操作流程速度表》。 程序编辑操作说明 程序编辑 | 操作步骤 | 进入编辑状态 | 在手动状态下,按[编辑]键。 | 退出编辑状态 | 在程序编辑状态的行号闪动状态下,按[退出]键,返回到手动状态,程序将自动保存。 | 清空程序区 | 在程序编辑状态的行号闪动状态下,按住[清程]键2秒以上,直到第00行的END指令时才能松手。 | 录入新程序 | 先清空程序区,这时只剩下一条程序,即第00行的END指令,然后按[插入]键,第00行程序的指令变成了PAUSE,且闪动显示;按[∧]、[∨],指令名称被改变;直到找出所需要的指令,按[回车]进入指令的数据区(对于无参数指令,回车后即完成本条程序的录入),按上下左右箭头修改,改好后按回车键,此行程序录入完毕。可以看到下一行变成了END指令,再按[插入]键,用相同的办法录入程序,直到所有程序录入完毕。新程序的录入过程也就是在最后一条程序(END)上不断插入新程序的过程。 特别注意:在录入新程序时明明是很正确的程序,控制器却报警出错,这种情况出现在跳转指令中;如JUMP指令、J―BIT指令、J―CNT。如果这三条指令中的跳转行号大于本指令所在的当前行号,由于跳转的目标尚未录入,控制器会误判录入行号有错。为了避免这种情况,我们要求在录入新程序时,把这三条指令中所出现的跳转行号暂时用00代替,等程序录入完毕再修改过来。 | 修改程序 | 参考上面“录入新程序”的办法,对当前行程进行修改。 | 插入程序 | 在程序编辑状态的行号闪动状态下,按[插入]键,将在当前行的上方插入一条新程序,对新程序进行修改操作即可。 | 删除程序 | 在程序编辑状态的行号闪动状态下,按[删除]键,本行程序被删除,下面的程序自动上移。 | 浏览程序 | 在程序编辑状态的行号闪动状态下,按[∧]、[∨],可以浏览每一行程序的指令名称,但您想快速看一下指令参数,怎么办?你只需按[<]键,本行参数将会闪动1秒钟。 |
指令详解(HH---------行号,×××××-----数据)
序号 | 指令名称 | 指令 显示形式 | 说 明 | 1 | 暂停指令 | HH_PAUSE 无参数 | 程序暂停,等待面板启动按键或端子启动信号或A操作、B操作信号。 | 2 | 位移指令 | HH_G-LEN ±××××× | 执行此指令时,控制器将按****SPEED指令所赋值的速度,本指令所指定的位移量参数设置中所设定的起跳频率、升降速曲线、间隙补偿等,控制电机运行; 如果此指令无SPEED语句,则以起跳频率作为默认值; 参数的第一位为符号位,0为正位移、―为负位移; 参数范围:―7999999~~+7999999单位:脉冲数 若参数为0,将会报警提示。 | 3 | 速度赋值 指令 | HH_SPEED ××××× | 此程序以下的所有运行都将以此指令所设定的速度运行,直到下一个速度赋值指令出现为止; 参数范围:1―39999 单位:脉冲数/秒(HZ) 若参数为0,将会报警提示。 | 4 | 延时指令 | HH_DELAY ××××× | 延时时间;参数范围:1---7999999 单位:毫秒; 如果参数设定值为0,系统将报警提示。 | 5 | 无条件跳 转指令 | HH_JUMP ×× | 无条件跳转指令,参数××表示要跳转的程序行号;当××行号超过END指令行号时,将报警提示。 | 6 | 循环指令 | HH_LOOP ××××× | 从当前行到指定行执行循环;前两位为行号(要求小于当前行),后五位为循环次数(0定义为无限次)。行号超过当前行号时,系统将报警提示。 | 7 | 运行到 某一位置 | HH_GOTO ±××××× | 运行到指定位置,在实际应用中,此位置一般为系统的参考点;参数的第一位为符号位,正数表求此点位于零点的正方向、负数表示此点位于零点的负方向; 若参数值=0,表示返回零点; 参数范围:―7999999~~+7999999单位:脉冲数 | 8 | 输出指令 | HH_OUT ×××× | 参数的前三位从左到右依次对应输出端子的OUT1―OUT3;同时对应前面板的三个输出指示灯1---3。每位有三个选项:0、1、N: 0-----对应输出端子为高电平,负载不导通,面板指示灯灭 1-----对应输出端子为低电平,负载导通,面板指示灯亮 N----保持上一个状态 参数的最后一位,专门为控制器内部的蜂鸣器所设计: 0-----执行此指令时,蜂鸣器响一短声;(注意:响声结束后才能执行下一条程序) 1-----执行些指令时,蜂鸣器响一长声;(注意:响声结束后才能执行下一条程序) N-----执行此指令时,蜂鸣器不响。 | 9 | 测位跳转 | HH_J-BIT ×××× | 前两位为行号,指明所跳转的位置,第五位为输入口IN1―IN2的其中之一;第八位为跳转条件(0或1);当所测定的输入口为所设定的状态时跳转到指令行号,否则,顺序执行。行号超过END指令行号时,将报警提示。 |
序号 | 指令名称 | 指令显示形式 | 说 明 | 10 | 计数跳转 | HH_J―CNT ×××××× | 本指令为计数器指令,前两位为行号,指明程序所跳转的位置;后五位为设定值。当计数器计数到或大于设定数值时,则跳转到指定行号,否则顺序执行。行号超过END指令行号时,将报警提示。 | 11 | 变量位移 | HH_GO―AB ±× | 本指令为位移指令,运行方式和HH_G--LEN±×××××××××相同,所不同的是此指令的位移量并不是一个固定的、己知的常数,而是一个变量,此变量产生于中断操作,本控制器发生****的中断操作时,步进电机作降速停止后,这时的坐标值即是此变量,由于有A、B两个中断操作,所以此指令的第八位以A、B分别表示各自操作所产生的变量,C变量表示为当****的一个中断发生时,被中断的位移指令剩余的位移量,此变量为有符号数,此指令的第七位为符号位,0表示参数和变量相同,―表示参数和变量符号相反。 | 12 | 计数器加1 | HH_CNT―1 无参数 | 本指令为计数器指令,控制器内总有一计数器单元,容量为999999,计数器的值可实时的计数显示状态下显示;计数器的值在断电时不会自动保存,除非您手动按一下计数器存贮键[>],控制器上电后,会自动把****存贮的值调入计数器单元,本指令对计数器进行加1操作。 | 13 | 计数器清零 | HH_CNT―0 无参数 | 本指令为计数器指令; 本指令把计数器清零。除了本指令外还可以通过计数器清零按键随时可以把计数器清零(在自动状态下),清零按键为:[∨]。 | 14 | 坐标清零 | HH_CLR
| 执行些指令,当前坐标及显示都被清零,电机以些位置为新零点。 | 15 | 结束指令 | HH_END 无参数 | 程序结束行,程序运行到此指令时,表示本控制器自动运行结束控制器返回自动待运行状态。 该指令不可编辑,且总是位于程序的最后一行。 |
・应用领域

・ 以上为本款产品的基本介绍,如需详细了解更多多样化创意搭配以及购买请联系下方联系方式 ・厂家直销 根据您的实际情况可否需要特殊规格特殊规格的步进电机,请和我们沟通,在技术允许的范围内,加工订货。例如,出轴的直径、长短、伸出方向、相线(编码器线)长度等。如购买配套设置可免费给您组装调试好! 联系人:李先生 电话:18010107283 QQ:2223199877 微信:shidaichaoqun 淘宝店铺:https://shop114114198.taobao.com/index.htm?spm=2013.1.w5002-16614260111.2.ZPGxYs 
|











